How to Set Up Autonomous Navigation
This tutorial walks through setting up indoor autonomous navigation on Raph
Rover using the raph_nav package. The stack uses built-in sensors for obstacle
detection, and controls the rover through a Nav2 pipeline tailored for Ackermann
steering. Additionally a specialized RPP controller plugin is provided to handle
Ackermann kinematics and steering constraints.
This will allow your Raph Rover to build a map of an unknown environment or
navigate on a pre-made map, issuing steering and speed commands via
ackermann_msgs/AckermannDrive.
Prerequisites
Firstly, you will have to connect to the Rover via SSH:
Also make sure that your Rover is connected to a local network with Internet access:
For the purpose of autonomous navigation, we've prepared the raph_nav package
which makes use of other packages available in ROS to provide autonomous
capabilities. You won't have to write a single line of code, but some
configuration may need to be tweaked to work best in your environment.
If you want to visualize the navigation process, you will need a computer with ROS 2 installed. You can follow the official ROS 2 installation guide for your operating system.
The Raph Rover sensor setup is:
- RPLiDAR - publishing filtered scans on
/rplidar/scan_filtered - OAK-D stereo camera - publishing depth images on
/oak/stereo/image_rawand camera info on/oak/stereo/camera_info
Both sensors must be running and publishing before launching the navigation stack. This should be the case if you are using the default RaphOS configuration. Different sensors can also be used, if you want to equip the robot differently.
Preparing the environment
On Raph Rover
Clone and build the raph_nav workspace. Create a ROS workspace if you haven't
done so already:
mkdir -p ~/ros_ws/src
cd ~/ros_ws/src
Clone the raph_nav repository:
git clone https://github.com/RaphRover/raph_nav
Use rosdep to install dependencies:
sudo apt update
cd ~/ros_ws
rosdep update
rosdep install --from-paths src --ignore-src -r -y
Build the workspace (both raph_nav and the custom controller plugin):
colcon build --symlink-install
Source the workspace:
source ~/ros_ws/install/setup.bash
You will have to source the workspace on every terminal session you want to use
the package on. If you want to do it automatically upon logging into a session,
you need to modify the /etc/ros/setup.bash:
Replace the line:
source /opt/ros/jazzy/setup.bash
With:
source ~/ros_ws/install/setup.bash
On your computer
Your computer is used for visualizing data in RViz2 and sending navigation goals. Install the ROS 2 visualization tools if you haven't already:
sudo apt install ros-${ROS_DISTRO}-rviz2
In order to see the robot model in RViz2, you will need to have the
raph_description package installed:
sudo apt install ros-${ROS_DISTRO}-raph-description
Navigation stack overview
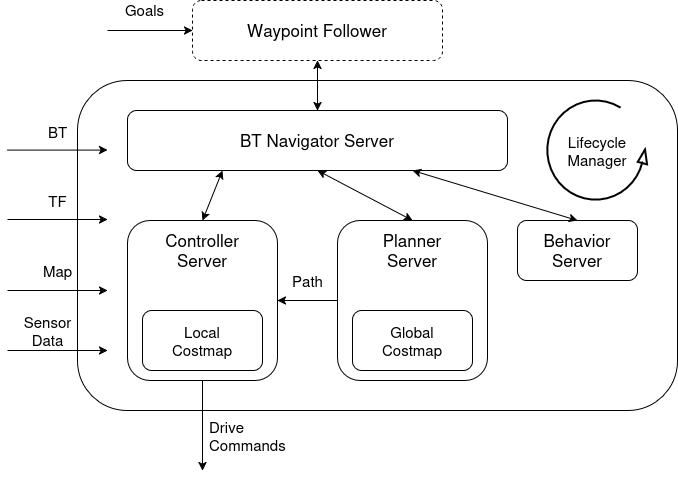
Navigation stack consists of two main parts: SLAM Toolbox (or AMCL) and the Nav2. All Nav2 nodes run inside a single composable container for low-latency intra-process communication.
Here's the simplified diagram of the Nav2 architecture:
SLAM Toolbox
In the raph_nav package, SLAM Toolbox provides
Simultaneous Localization and Mapping
capabilities. It reads the filtered LiDAR scan to build an occupancy grid map
and publishes the map -> odom transform used by the Nav2 Stack for
localization.
SLAM Toolbox takes as input:
- Filtered LiDAR scan data (topic:
/rplidar/scan_filtered) - Laser frame position (
base_footprint -> laser_frametransform) - Current robot odometry (
odom -> base_footprinttransform frommerged_odom)
As output it publishes:
- Occupancy grid map on
/mapand/map_metadata - Odometry correction (
map -> odomtransform)
SLAM Toolbox does not broadcast map -> base_footprint directly, because that
would introduce two root coordinate frames (map and odom). Instead it
publishes map -> odom, which captures the drift between the odometry estimate
and the true position within the map.
Configuration tips
SLAM Toolbox parameters can be found in config/slam_toolbox.yaml.
Key things to look out for when tuning SLAM Toolbox parameters:
- Check frame and topic wiring:
scan_topic,base_frame,odom_frame,map_frame. If these are wrong, you will not receive a map. - Map quality vs compute:
resolution. Lower values increase detail but CPU and memory usage. It's best to keep the resolution consistent with the Nav2 costmaps. - Scan integration cadence:
minimum_travel_distance,minimum_travel_heading,minimum_time_interval,throttle_scans. Lower thresholds create denser mapping updates but increase compute load. - Global consistency:
do_loop_closing,loop_search_maximum_distance,loop_match_minimum_response_coarse,loop_match_minimum_response_fine. These strongly affect long-run drift vs false loop closures. - Matcher behavior under odom drift:
correlation_search_space_dimension,correlation_search_space_resolution,distance_variance_penalty,angle_variance_penalty.
For a full description of each parameter visit the SLAM Toolbox GitHub repository.
Nav2
Nav2 is the ROS 2 navigation framework responsible for global path planning, local trajectory tracking, recovery behaviors, and goal execution. Full Nav2 documentation is available at docs.nav2.org.
The raph_nav Nav2 stack runs inside a single composable container which
consists of:
- Planner Server:
Uses
nav2_smac_planner::SmacPlannerHybridwhich supports Reeds-Shepp curves and reverse maneuvers - well suited for Ackermann vehicles. - Controller Server:
Uses
nav2_ackermann_rpp_controllerwhich is a custom fork ofnav2_regulated_pure_pursuit_controllerwith Ackermann-specific extensions (see custom controller below). - Behavior Tree Navigator: Manages navigation execution using the provided behavior trees.
- Waypoint Follower: Handles sequential waypoint navigation.
- Lifecycle Manager: Manages the lifecycle of all navigation nodes.
- PointCloudXyzNode:
Converts the OAK-D depth image into a point cloud on
nav2/pointstopic used by the costmap layers. - Behavior Server: Runs recovery and utility behaviors (for example spin, backup, and drive-on-heading) when normal path execution cannot continue.
The controller server's cmd_vel output is intentionally remapped to
dummy/cmd_vel. Raph Rover uses an Ackermann drivetrain, so the actual actuator
commands are published on controller/cmd_ackermann
(ackermann_msgs/AckermannDrive). The Twist remap prevents other nodes from
accidentally consuming the unconfigured Twist output.
Custom controller
The nav2_ackermann_rpp_controller plugin is a custom fork of
nav2_regulated_pure_pursuit_controller with the following Ackermann-specific
extensions:
1. Native Ackermann output - In addition to the standard
geometry_msgs/TwistStamped required by Nav2, the controller simultaneously
publishes ackermann_msgs/AckermannDrive on controller/cmd_ackermann with
explicit speed, steering angle, steering angle rate, acceleration, and jerk
fields. The cmd_vel output is remapped to dummy/cmd_vel to prevent
accidental consumption.
2. Ackermann-aware dynamic windowing - The dynamic window sampling operates in (speed, steering-angle) space rather than space. Feasible steering targets are bounded by the physical steering rate and angle limits. The selected steering angle is then converted to to maintain Nav2 compatibility:
where is the wheelbase.
3. Steering feedback gate - The controller reads actual servo positions
(servo_l_joint, servo_r_joint) from /joint_states and gates forward motion
until the measured steering angle is within steering_angle_tolerance of the
commanded angle. A hysteresis latch (steering_angle_release_tolerance)
prevents rapid chattering near the threshold.
4. Cusp-aware path truncation - Reeds-Shepp paths often contain direction
reversals (cusps) separated by short micro-segments. The controller splits the
path at cusps and tracks only the first viable segment (length ≥
min_segment_length), discarding the rest until that segment is complete. This
prevents unstable micro-maneuvers on Ackermann vehicles.
Configuration tips
Nav2 configuration can be found in config/navigation.yaml.
Below are the newly added parameters for the custom controller plugin: |
Parameter | Value | Description | |---|---|---| | wheelbase | 0.382 m |
Front-to-rear axle distance | | track_width | 0.385 m | Steering track width |
| max_steering_angle | 1.08 rad | Physical steering limit | |
max_steering_angle_velocity | 4.0 rad/s | Max steering rate | |
steering_angle_tolerance | 0.8 rad | Gate engagement threshold | |
steering_angle_release_tolerance | 0.05 rad | Gate release threshold
(hysteresis) | | min_segment_length | 0.1 m | Minimum cusp-segment length |
Nav2 provides an extensive configuration guide. You can refer to it when adjusting the configuration for your environment.
AMCL localization
AMCL provides localization
on a pre-built map, replacing SLAM Toolbox. Its configuration is in
config/amcl.yaml.
No dedicated Ackermann motion model is available in Nav2's AMCL implementation.
The nav2_amcl::OmniMotionModel is used instead, which still accepts
Ackermann-like motion commands and provides reasonable localization performance.
For AMCL to start localizing, you must provide an initial pose estimate. In
RViz2, select the 2D Pose Estimate tool from the toolbar and click on the
map at the rover's approximate starting position. Set the fixed frame to map
before doing this.
After setting the initial pose, AMCL will start publishing the
map -> base_footprint transform and any localization errors visible in RViz2
should disappear. After that, the Nav2 stack can start navigating on the map.
The initial pose can also be set programmatically by publishing a
geometry_msgs/PoseWithCovarianceStamped message on /initialpose, or by
setting set_initial_pose: true and initial_pose in config/amcl.yaml. AMCL
updates its estimate every time a new initial pose is received.
Minor inaccuracies in the initial pose are acceptable. AMCL will correct them over time as the rover moves and receives more sensor data. However, a better initial estimate leads to more accurate localization from the start.
Configuration tips
Key things to look out for when tuning AMCL parameters:
- Localization update cadence:
update_min_d,update_min_a. Lower values update more often but cost more CPU. - Particle filter robustness vs compute:
min_particles,max_particles,pf_err,pf_z. Increase particles for difficult or repetitive environments, reduce for lower CPU load. - Laser model tuning:
laser_model_type,max_beams,sigma_hit,laser_likelihood_max_dist, and the weight set (z_hit,z_rand,z_short,z_max). These are key when AMCL drifts or converges slowly. - Motion model noise sensitivity:
alpha1toalpha5. Increase if odom is noisy; decrease if odom is stable and AMCL appears jittery.
Full parameter documentation can be found in the Nav2 AMCL docs.
Launching the navigation stack
Launch full navigation
To launch Nav2 with SLAM Toolbox and default configuration, run:
ros2 launch raph_nav navigation.launch.xml
The launch file accepts the following arguments:
localization: Use SLAM Toolbox mapping mode (false, default) or AMCL localization-only mode (true).slam_params_file: Path to SLAM parameters file (used whenlocalizationis false; default:raph_nav/config/slam_toolbox.yaml).amcl_params_file: Path to AMCL parameters file (used whenlocalizationis true; default:raph_nav/config/amcl.yaml).map_file: Path to the map YAML file (required whenlocalizationis true; default:raph_nav/maps/empty_map.yaml).navigation_params_file: Path to the Nav2 parameters file (default:raph_nav/config/navigation.yaml).
For example to launch autonomous navigation on a pre-built map with AMCL localization:
ros2 launch raph_nav navigation.launch.xml localization:=true map_file:=/path/to/your/map.yaml
Launch only SLAM Toolbox
Run this if you want to use or tune SLAM independently from Nav2, for example to build a map before starting navigation:
ros2 launch raph_nav slam_toolbox.launch.py
To use a custom SLAM parameter file:
ros2 launch raph_nav slam_toolbox.launch.py params_file:=/path/to/slam_toolbox.yaml
In order to save a map to file, you can use the built-in map_saver wrapper:
ros2 service call /slam_toolbox/save_map slam_toolbox/srv/SaveMap "{name: {data: 'map_name'}}"
This creates map_name.yaml and map_name.pgm in the current directory.
Visualizing navigation in RViz2 on your computer
Launch RViz2 and add the following displays:
- Map on topic
/global_costmap/costmap: Global costmap. Set color scheme tocostmapfor better clarity. - LaserScan on
/rplidar/scan_filtered: Filtered LiDAR scans. - RobotModel: Rover model.
- Path on
/received_global_plan: Planned path to the goal.
After setting the fixed frame to map, you should see the rover's position on
the map and planned path to the goal.
Sending a navigation goal
In RViz2, select the 2D Goal Pose tool from the toolbar, then click and drag to set both position and orientation.
Provided the target is in a reachable position on the map, the rover will plan a path and begin driving. Because the planner uses Reeds-Shepp curves, the path may include reverse segments - this is expected behavior for Ackermann vehicles.
You can also send navigation goals programmatically by publishing a
geometry_msgs/PoseStamped message on /goal_pose:
ros2 topic pub /goal_pose geometry_msgs/PoseStamped "{header: {frame_id: 'map'}, pose: {position: {x: 0.0, y: 0.0, z: 0.0}, orientation: {x: 0.0, y: 0.0, z: 0.0, w: 1.0}}}"
The rover will begin navigating to the goal as long as it is reachable and within the map boundaries.
Congratulations! You can now control your Raph Rover autonomously and send navigation goals to it.